当人用眼睛看事物的时候,会感觉到近处的东西是比远处的东西要大一些的,通俗的说,这就是透视。
总的来说。透视变换是将3D的世界转换到2D图像上的一种手段,人的视觉系统和摄像头视觉系统也是基于这一工作原理。
对透视变化的研究,就是要搞明确。为什么我们看到的东西会近处大而远处的小。
一 參考系
透视变换最主要是用于測量,因此在说明透视变换之前。有必要说明一下參考系的问题。
为了有效的分析3D世界。以下五种參考系是必要的:
1. 对象參考系(Object)
有时候也叫做本地參考系(Local Coordinate Systems),能够将其粗鲁的理解为视界中某个物体的以自己为中心的坐标系。其作用范围只在物体本身。比方,当我们在为某个物体建模的时候,我们必须找到一个点,用于将建模用的模块组装起来。
这是一个三维坐标系。
2. 世界參考系(World)
也被称为宇宙坐标系(universe Coordinate Systems),这个坐标系是其它全部坐标系的基础,用于将其它的坐标系联系在一起。
这是一个三维坐标系。
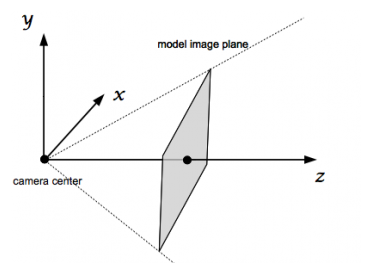
3. 摄像头參考系(Camera)
一般来说,为了简化模型,我们会如果所使用的摄像头为针孔摄像头,而图像平面被觉得是在焦点前(相机中心)。
摄像头參考系为右手坐标系。而且将Z轴指向图像平面,见下图:
这是一个三维坐标系。
4. 图像參考系(Image Plane)
图像參考系就是在摄像头中的投影面,一般来说,图像參考系的中点就是相应摄像头的焦点的位置,图像平面和摄像头中心的距离为焦距,这个平面会和摄像头的Z轴垂直。
这个參考系的
这是一个二维坐标系。
5. 像素參考系(Pixel)
和图像參考系一样,这也是一个二维的坐标系,在像素參考系中的每一个点都有和图像參考系中有相应关系。
五个坐标系之间的空间关系:
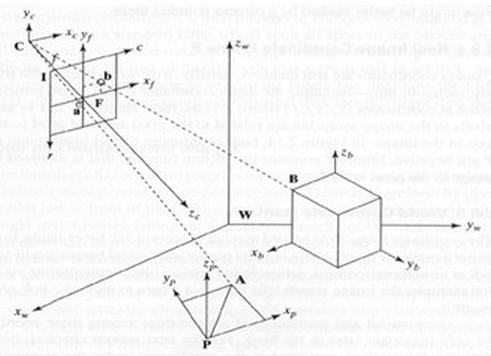
这5个參考系之间的转换关系如此下:
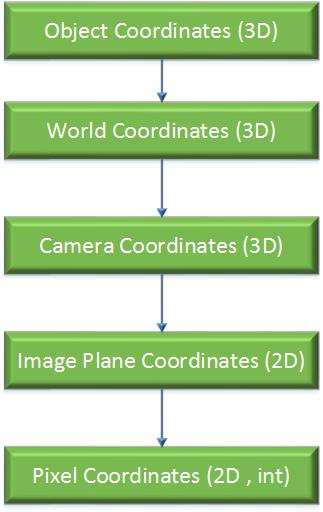
上图就是从3D场景转换到2D图像的整个流程。
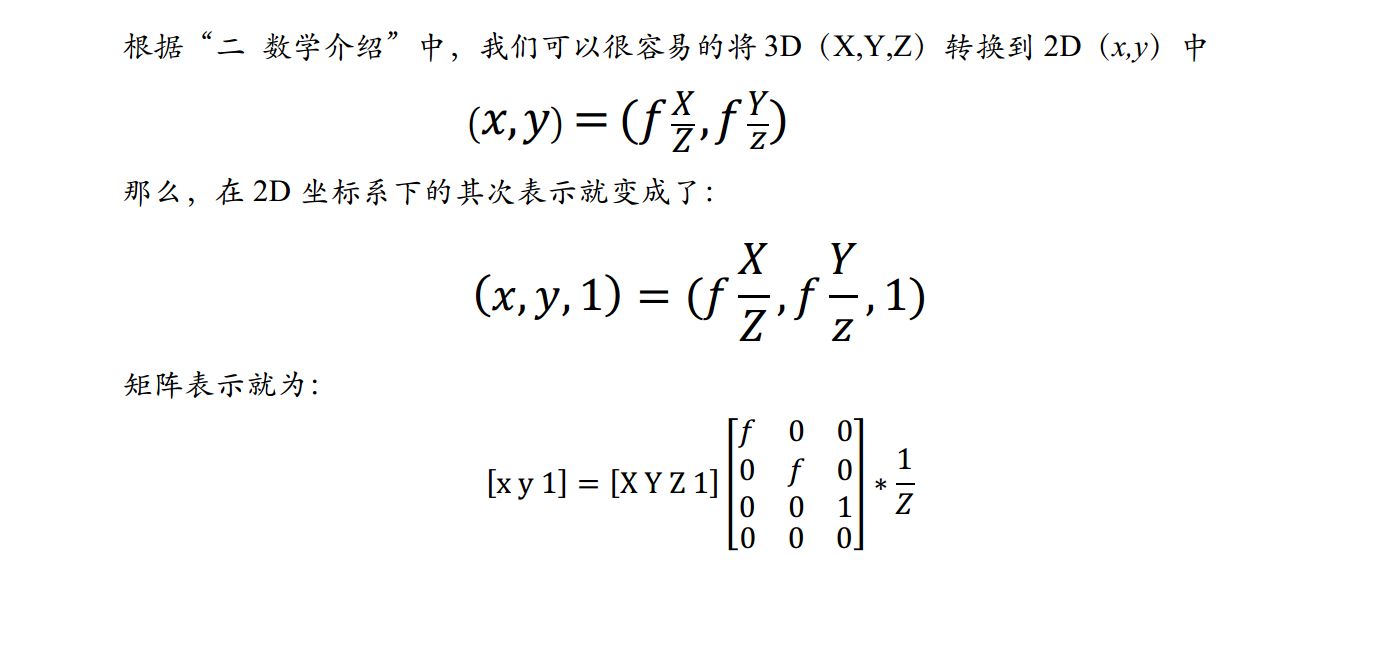
二 数学介绍
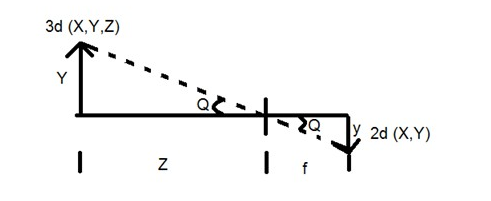
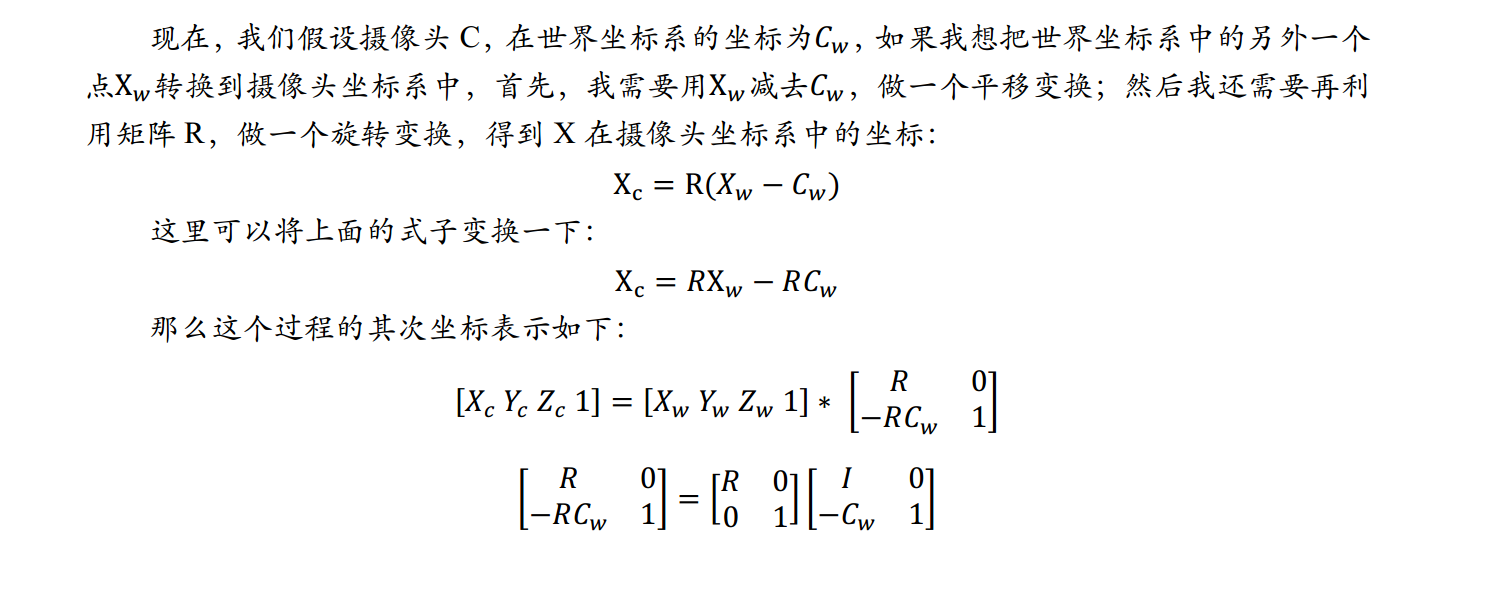
三 世界坐标系到摄像头坐标系
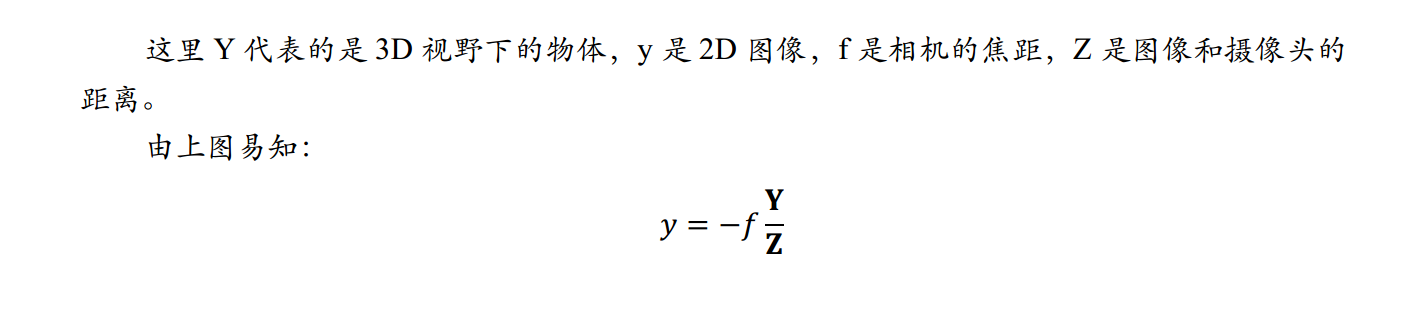
四 摄像头坐标系到图像坐标系